Robotum Cooperativum Flexibile Seriei ER
Parametri Technici
| ER3 | ER7 | ER3 Pro | ER7 Pro | |||||
| Specificatio | ||||||||
| Onus | 3kg | Septem chiliogrammata | 3kg | Septem chiliogrammata | ||||
| Radius laboris | 760mm | 850mm | 760mm | 850mm | ||||
| Pondus mortuum | Circiter 21 kg | Circiter 27 kg | Circiter 22 kg | Circiter 29 kg | ||||
| Gradus Libertatis | Sex articulationes rotatoriae | Sex articulationes rotatoriae | Septem articulationes rotatoriae | Septem articulationes rotatoriae | ||||
| MTBF | >35000h | >35000h | >35000h | >35000h | ||||
| Fons potentiae | DC 48V | DC 48V | DC 48V | DC 48V | ||||
| Programmatio | Doctrina trahendi et interfacies graphica | Doctrina trahendi et interfacies graphica | Doctrina trahendi et interfacies graphica | Doctrina trahendi et interfacies graphica | ||||
| Perfunctio | ||||||||
| POTENTIA | Mediocris | Valor maximus | Mediocris | Valor maximus | Mediocris | Valor maximus | Mediocris | Culmen |
| CONSUMPTIO | 200W | 400W | 500W | 900W | 300W | 500W | 600W | 1000W |
| Salus | > XXII Functiones Salutis Adaptabiles | > XXII Functiones Salutis Adaptabiles | > XXII Functiones Salutis Adaptabiles | > XXII Functiones Salutis Adaptabiles | ||||
| Certificatio | Obtempera cum norma "EN ISO 13849-1, Cat. 3, PL d, Certificatione CE EU". | Obtempera cum norma "EN ISO 13849-1, Cat. 3, PL d, Certificatione CE EU". | Obtempera cum norma "EN ISO 13849-1, Cat. 3, PL d, Certificatione CE EU". | Obtempera cum norma "EN ISO 13849-1, Cat. 3, PL d, Certificatione CE EU". | ||||
| Vis detegens, flange instrumenti | vis, XyZ | Momentum vis, XyZ | Vis, xyZ | Momentum vis, XyZ | Vis, xyZ | Momentum vis, XyZ | Vis, xyZ | Momentum vis, xyz |
| Ratio resolutionis mensurae vis | 0.1N | 0.02Nm | 0.1N | 0.02Nm | 0.1N | 0.02Nm | 0.1N | 0.02Nm |
| Accuratio relativa moderationis vis | 0.5N | 0.1Nm | 0.5N | 0.1Nm | 0.5N | 0.1Nm | 0.5N | 0.1Nm |
| Ambitus rigiditatis Cartesianae adaptabilis | 0~3000N/m, 0~300Nm/radians | 0~3000N/m, 0~300Nm/radians | 0~3000N/m, 0~300Nm/radians | 0~3000N/m, 0~300Nm/radians | ||||
| Ambitus temperaturae operativae | 0~40°℃ | 0~40°℃ | 0~40°℃ | 0~40°C | ||||
| Humiditas | 20-80% RH (non condensans) | 20-80% RH (non condensans) | 20-80% RH (non condensans) | 20-80% RH (non condensans) | ||||
| CLXXX°/secunda | ||||||||
| CLXXX°/secunda | ±0.03 mm | ±0.03 mm | ±0.03 mm | ±0.03 mm | ||||
| CLXXX°/secunda | Ambitus operis | Celeritas maxima | Ambitus operis | Celeritas maxima | Ambitus operis | Celeritas maxima | Ambitus operis | Celeritas maxima |
| CLXXX°/secunda | ±170° | CLXXX°/secunda | ±170° |
| ±170° | CLXXX°/secunda | ±170° | 110°/s |
| Axis 2 | ±120° | CLXXX°/secunda | ±120° |
| ±120° | CLXXX°/secunda | ±120° | 110°/s |
| Axis III | ±120° | CLXXX°/secunda | ±120° | CLXXX°/secunda | ±170° | CLXXX°/secunda | ±170° | CLXXX°/secunda |
| Axis 4 | ±170° | CLXXX°/secunda | ±170° | CLXXX°/secunda | ±120° | CLXXX°/secunda | ±120° | CLXXX°/secunda |
| Axis V | ±120° | CLXXX°/secunda | ±120° | CLXXX°/secunda | ±170° | CLXXX°/secunda | ±170° | CLXXX°/secunda |
| Axis VI | ±360° | CLXXX°/secunda | ±360° | CLXXX°/secunda | ±120° | CLXXX°/secunda | ±120° | CLXXX°/secunda |
| Axis VII | ------ | ------ | ------ | ------ | ±360° | CLXXX°/secunda | ±360° | CLXXX°/secunda |
| Celeritas maxima ad finem instrumenti | ≤3m/s | ≤2.5m/s | ≤3m/s | ≤2.5m/s | ||||
| Proprietates | ||||||||
| Gradus tutelae IP | IP54 | IP54 | IP54 | IP54 | ||||
| Classis Cubiculi Puri ISO | 5 | 6 | 5 | 6 | ||||
| Strepitus | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ||||
| Robotum impositum | Formaliter impositus, inverse impositus, lateraliter impositus | Formaliter impositus, inverse impositus, lateraliter impositus | Formaliter impositus, inverse impositus, lateraliter impositus | Formaliter impositus, inverse impositus, lateraliter impositus | ||||
| Portus I/O Usus Generalis | Ingressus Digitalis 4 | Ingressus Digitalis 4 | Ingressus Digitalis 4 | Ingressus Digitalis 4 | ||||
|
| Egressus Digitalis 4 | Egressus Digitalis 4 | Egressus Digitalis 4 | Egressus Digitalis 4 | ||||
| Portus I/O Securitatis | Sistus externus in casu necessitatis 2 | Sistus externus in casu necessitatis2 | Sistus externus in casu necessitatis 2 | Sistus externus in casu necessitatis2 | ||||
|
| Ianua securitatis externa2 | Ianua securitatis externa 2 | Ianua securitatis externa 2 | Ianua securitatis externa 2 | ||||
| Typus Coniunctoris Instrumenti | M8 | M8 | M8 | M8 | ||||
| Instrumenti I/O Fontis Potentiae | 24V/1A | 24V/1A | 24V/1A | 24V/1A | ||||
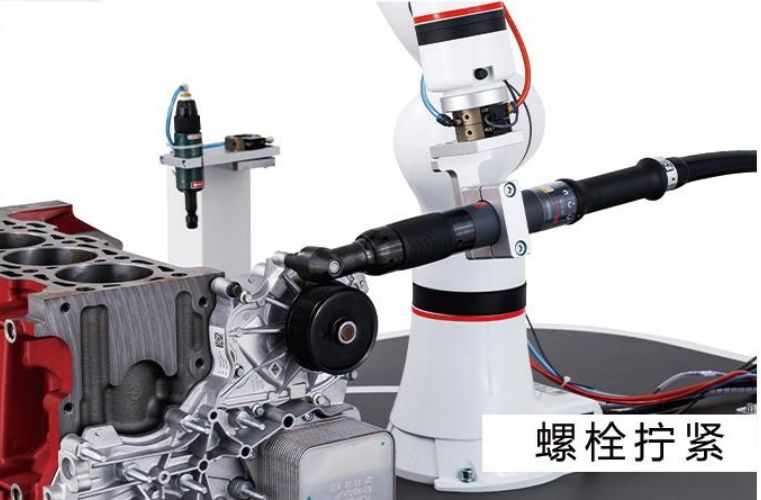
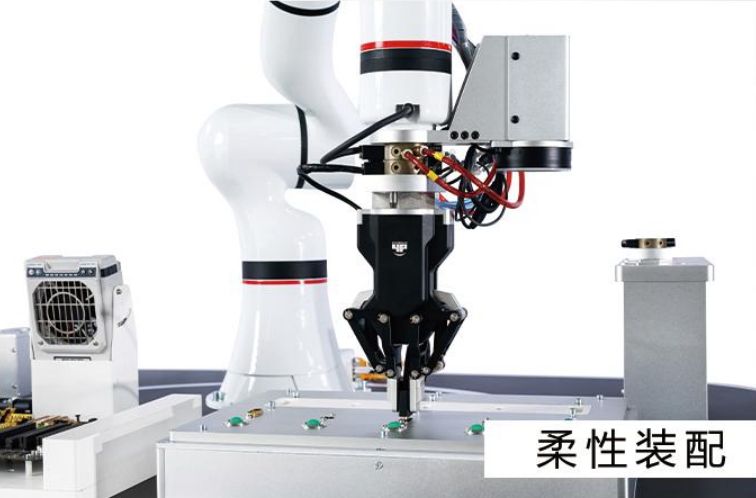
Applicationes industriales
Automata Collaborativa Flexibilia XMate apta sunt ad varia genera applicationum processuum, inter quas sunt flexibilis congregatio, cochleae clausura, inspectio et mensura, transportatio, remotio glutinis in materiis, cura instrumentorum, et cetera. Adiuvare possunt societates cuiusvis magnitudinis ad augendam productivitatem et ad automationem flexibilem assequendam.