


Positor Axis Singularis/Positor Soldaturae Automaticus
Parametri Technici
| Positor servo horizontalis unius axis | Servopositionis typi trunci principalis unius axis | Positor servomotoris unius axis, typus capsae fusi | |||||||||
| Numerus serialis | PROIECTA | Parametrum | Parametrum | OBSERVATIONES | Parametrum | Parametrum | Parametrum | OBSERVATIONES | Parametrum | Parametrum | OBSERVATIONES |
| 1. | Onus aestimatum | CC chiliogrammata | Quingenti chiliogrammata | Intra radium R300mm/R400mm axis principalis | Quingenti chiliogrammata | Octingenti chiliogrammata | 1200 chiliogrammata | Intra radium R400mm/R500mm/R750mm axis principalis | CC chiliogrammata | Quingenti chiliogrammata | Intra radium R300mm axis fusi est. Internum, distantia centri gravitatis ad flange ≤300mm |
| 2. | Radius gyrationis normalis | R300mm | R400mm | R600mm | R700mm | R900mm | R600mm | R600mm | |||
| 3. | Angulus rotationis maximus | ±360° | ±360° | ±360° | ±360° | ±360° | ±360° | ±360° | |||
| 4. | Celeritas rotationis aestimata | 70°/S | 70°/S | 70°/S | 70°/S | 50°/S | 70°/S | 70°/S | |||
| 5 | Accuratio positionis repetitae | ±0.08mm | ±0.10mm | ±0.10mm | ±0.12mm | ±0.15mm | ±0.08mm | ±0.10mm | |||
| 6 | Magnitudo disci rotatorii horizontalis | Φ600 | Φ800 | - | - | - | - | - | |||
| 7 | Dimensio limitis structurae dislocationis (longitudo × latitudo × altitudo) | - | - | 2200mm × 800mm ×90mm | 3200mm × 1000mm × 110mm | 4200mm × 1200mm × 110mm | - | - | |||
| 8 | Dimensio tota mutatoris positionis (longitudo × latitudo × altitudo) | 770mm × 600mm × 800mm | 900mm × 700mm × 800mm | 2900mm × 650mm × 1100mm | 4200mm × 850mm × 1350mm | 5400mm × 1000mm × 1500mm | 1050mm × 620mm × 1050mm | 1200mm × 750mm × 1200mm | |||
| 9 | Discus rotarius fusi | - | - | Φ360mm | Φ400mm | Φ450mm | Φ360mm | Φ400mm | |||
| 10 | Altitudo centri rotationis primi axis | 800mm | 800mm | 850mm | 950mm | 1100mm | 850mm | 900mm | |||
| 11 | Conditiones copiae electricae | Triphasis 200V ± 10% 50HZ | Triphasis 200V ± 10% 50HZ | Cum transformatore isolationis | Triphasis 200V ± 10% 50HZ | Triphasis 200V ± 10% 50HZ | Triphasis 200V ± 10% 50HZ | Cum transformatore isolationis | Triphasis 200V ± 10% 50HZ | Triphasis 200V ± 10% 50HZ | Cum transformatore isolationis |
| 12 | Classis insulationis | H | H | H | H | H | H | H | |||
| 13 | Pondus netum instrumentorum | Circiter ducenti chiliogrammata | Circiter quadringenta chiliogrammata | Circa quingentas chiliogrammata | Circa mille chiliogrammata | Circa 1600 kg | Circiter ducenti chiliogrammata | Circiter trecenti chiliogrammata | |||
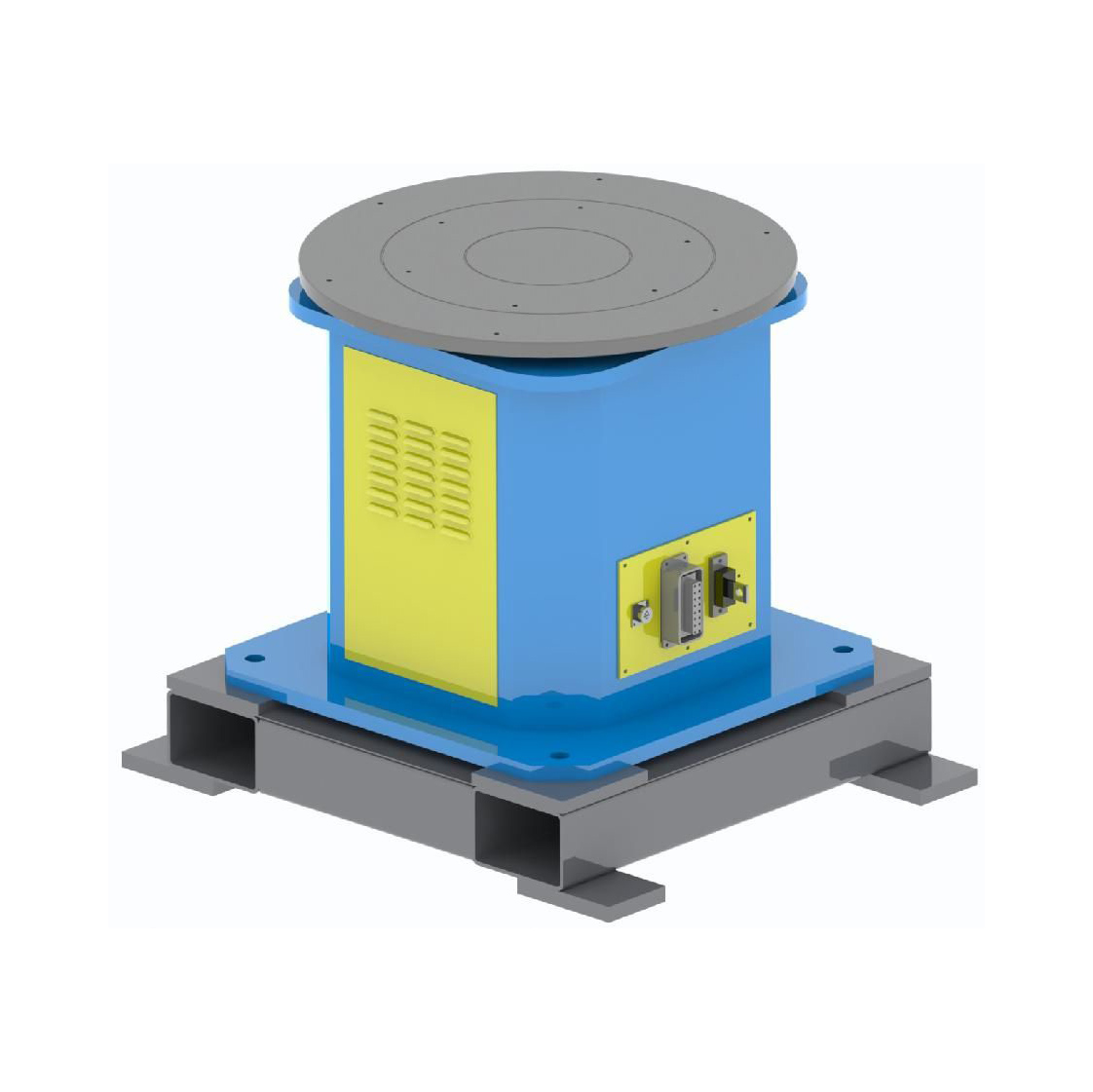
Positor servo horizontalis unius axis

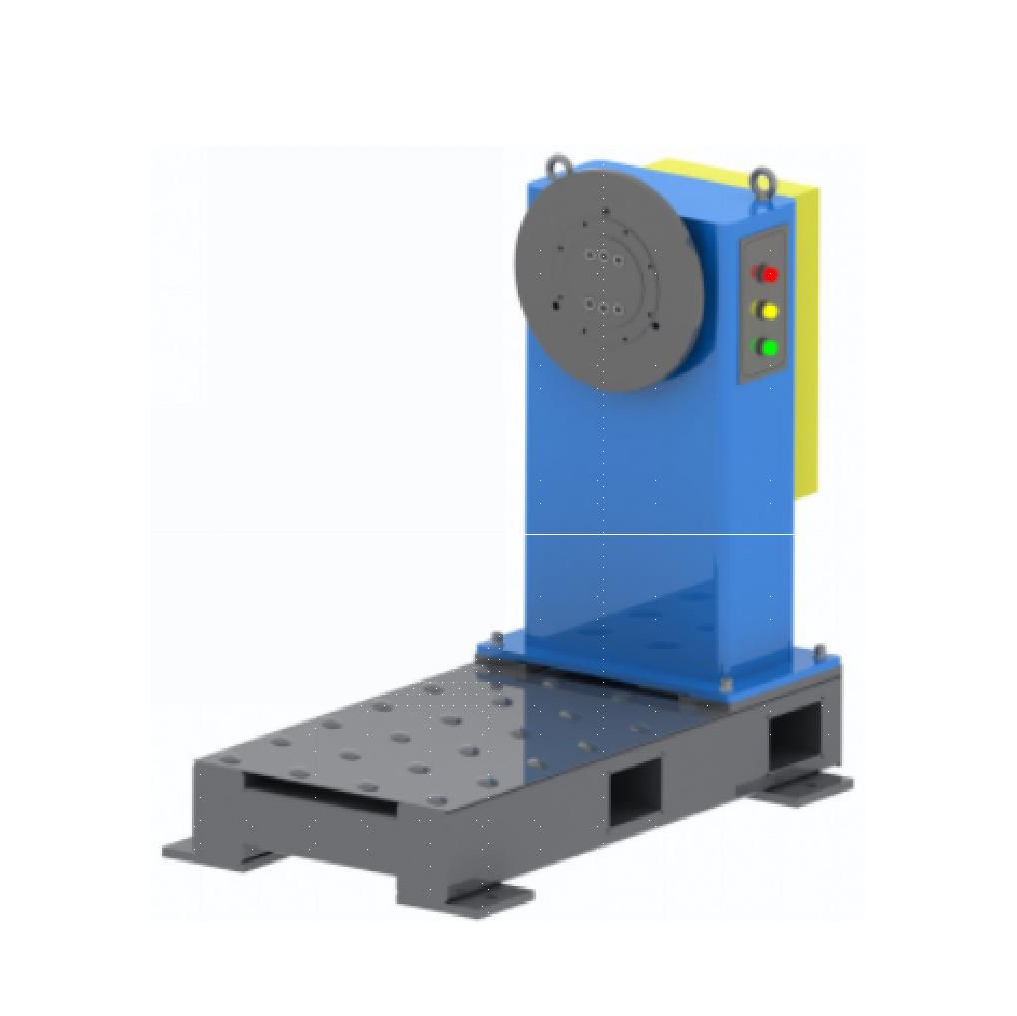
Servopositionis typi trunci principalis unius axis
Positor servomotoris unius axis, typus capsae fusi
Introductio Structurae
Servopositio horizontalis unius axis praecipue constat ex basi fixa integrali, capsa fusi rotatorii, disco rotatorio horizontali, servomotore AC et reductore praecisionis RV, mechanismo conductivo, scuto protectivo et systemate moderationis electricae. Basis fixa cum formis altae qualitatis conglutinatur. Post recoctionem et levamen tensionis, machinatione professionali tractabitur ut alta accuratio machinationis et praecisio positionum clavium adhibeatur. Superficies colore anti-rubigine aspergitur, quod pulchrum et generosum est, et color secundum desideria emptoris aptari potest.
Chalybs profilatus altae qualitatis, ad capsam fusi rotatorii electus, eius diuturnam firmitatem et stabilitatem post soldaduram, recoctionem, et machinationem professionalem praestare potest. Discus rotarius horizontalis profilis altae qualitatis fulcitur. Post curationem recoctionis, machinatio professionalis gradum politurae superficiei et stabilitatem propriam praestare potest. Superficies superior foraminibus cochlearibus cum intervallis normalibus machinatur, quod clientibus commodum est ad instrumenta positionis instituenda et figenda.
Eligendo motorem servo AC et reductorem RV ut mechanismum potentiae, stabilitas rotationis, accuratio positionis, longa durabilitas et parva ratio defectuum praestari potest. Mechanismus conductivus ex aere factus est, quod bonum effectum conductivum habet. Basis conductiva insulationem integralem adhibet, quae efficaciter motorem servo, robotum et fontem potentiae soldadurae protegere potest.
Systema moderationis electricae machinam programmabilem programmabilem Omron Iaponicam ad positionem moderandam adhibet, cum functione stabili et indice defectuum humili. Partes electricae ex notissimis societatibus, sive domesticis sive externis, selectae sunt ut qualitas et stabilitas usus confirmentur.








