



Automatum Stamping/Strucking SDCX RMD-300/200/160/120/35/08/110/20/50
Parametri Technici
| Numerus exemplaris | Gradus Libertatis | Modus agendi | Onus utile (kg) | Accuratio positionis repetitae (mm) | Amplitudo motus (°) | Celeritas maxima (°/s) | Inertia oneris permissibilis carpi (kg·m)2) | Pulsus circularis (cyclus/hora) | Radius motus (mm) | Pondus Locale (kg) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | Impulsor servo AC | trecenti | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | centum | 190 | 134 | mille3 | 3150 | 1500 |
| SDCX-RMD200 | 4 | Impulsor servo AC | ducenti | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 13003 | 3150 | 1500 |
| SDCX-RMD160 | 4 | Impulsor servo AC | CLX | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | trecenti | 78 | 15003 | 3150 | 1500 |
| SDCX-RMD120 | 4 | Impulsor servo AC | CXX | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | trecenti | 78 | MDLX3 | 3150 | 1500 |
| SDCX-RMD50 | 4 | Impulsor servo AC | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | CLXXI | CLXXI | CLXXI | 222 | 4.5 | MDCC2. | MMXL | DCCLX |
| SDCX-RMD20 | 4 | Impulsor servo AC | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | CLXX | CLXX | CLXXXV | 330 | 0.51 | MDCCLXXX1. | MDCCXX | 256 |
| SDCX-RMD08 | 4 | Impulsor servo AC | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | MDCCC1. | 1433 | CLXXX |
Adnotationes:
① Cursus probationis est 150mm altus et 1000mm latus, et tempus cycli actuale a condicionibus operis actualibus afficitur;
② Cursus probationis 200mm altus et 1000mm latus est, et tempus cycli actuale a condicionibus operis actualibus afficitur;
③ Cursus probationis 400mm altus et 2000mm latus est, et tempus cycli actuale a condicionibus operis actualibus afficitur;
Contactum cum gasibus et liquoribus inflammabilibus, explosivis et corrosivis vita; aqua, oleo et pulvere ne aspergaris; a fontibus strepitus electrici (plasma) procul habe.
Amplitudo motus
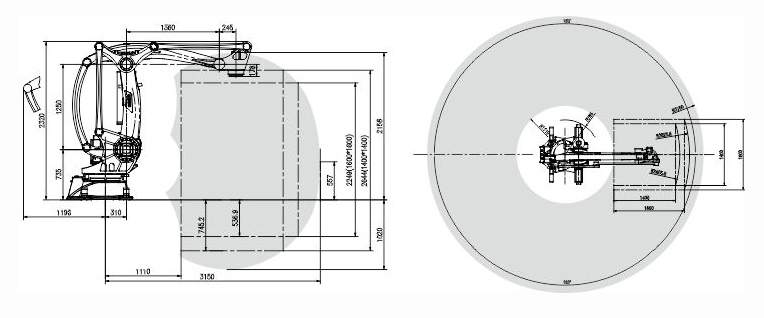
Diagramma Ambitus Motus pro SDCX-RMD300/200/160/120
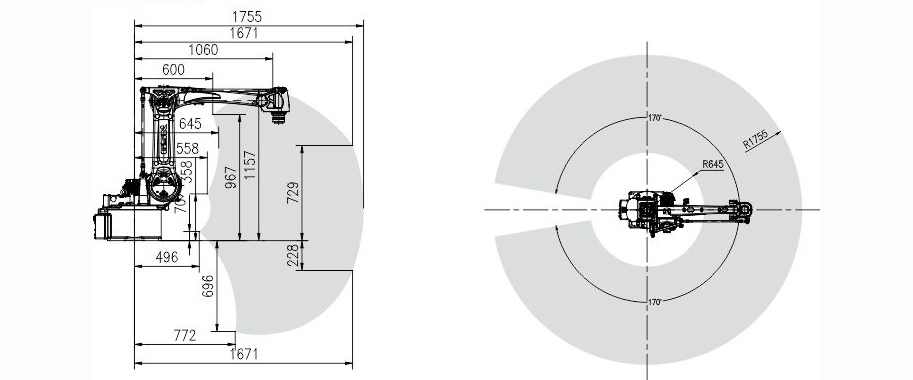
Diagramma Ambitus Motus pro SDCX-RMD20
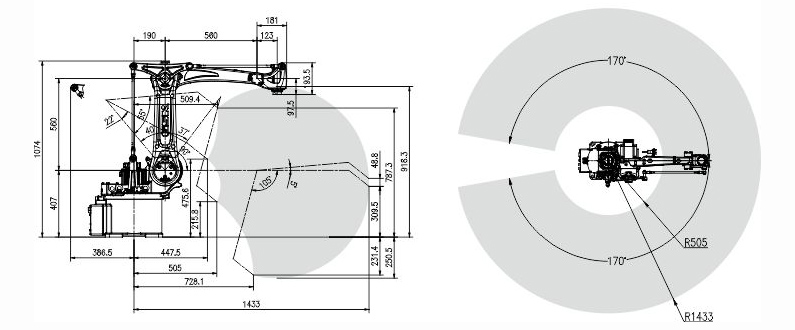
Diagramma Ambitus Motus pro SDCX-RMD08
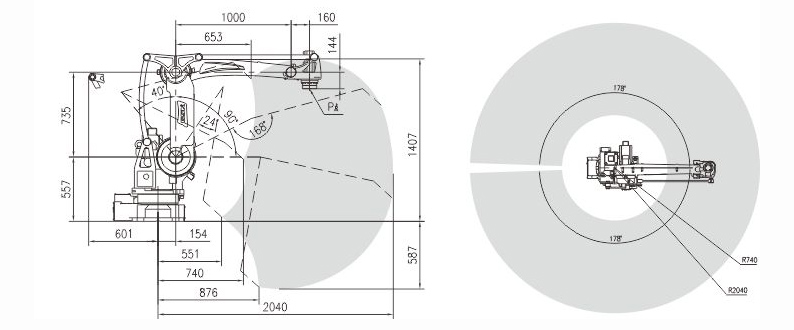
Diagramma Ambitus Motus pro SDCX-RMD50
Exhibitio Applicationis Producti
Solutiones
Schema technicum propositi tractationis spirae ferreae












